


組立自動化
ソリューション
「コネクタ挿入アプリケーション」
automated solution for “Connector insertion application”.
ONLINE SEMINARオンラインセミナー
開催期間
2020年11月16日(月)〜11月27日(金)
テーマ毎にお申し込みが必要となります。お申し込み画面で参加予定の日程を選択してください。
一覧をみる
ロボットIoTソリューション(NR:Connect)
ロボット開発部/小神野 東賢
NACHIのロボットIoTソリューションとして、生産ラインで稼働するロボットをネットワーク接続し、ロボットの健全性や生産稼働率に関わるデータを自動的に収集する見える化ソフトウェア「NR:Connect」をご紹介します。
自動車向け
組立自動化ソリューション
「コネクタ挿入アプリケーション」
新開発視覚制御技術で高速・高精度なコネクタ挿入作業を実現
ロボットアーム先端に設けた左右のカメラで、FPCとコネクタを認識。独自の制御方式によるリアルタイムでの追従補正を行い、コネクタの自動挿入を最速7秒*で実現します。
*当社実験条件に基づく
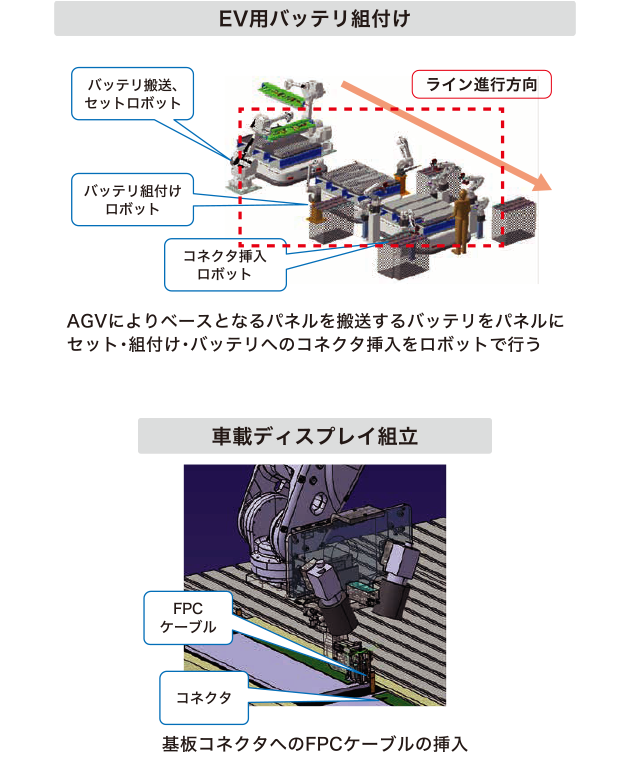
【適用例1】EVバッテリーの組付け作業
・AGVによりベースとなるパネルを搬送するバッテリをパネルにセット・組付け・バッテリへのコネクタ挿入をロボットで行う
【適用例2】車載ディスプレイ組立て
基盤コネクタへのFPCケーブルの挿入もロボットで行う
POINT
-
POINT 1
高精度・高速動作
独自の視覚制御で、高速・高精度にコネクタへの挿入作業を実現。
リアルタイムスキャンを実施し、目標点に到達するまで測定と移動を繰り返し。移動中に目標点がずれても、追従補正が可能。
力センサなどを併用しないため、コネクタ挿入時間が大幅に短縮されます。 -
POINT 2
多様な挿入作業に対応
幅5~41 mm までの広範囲のコネクタサイズに対応。
外引き回しの配線なしで外部カメラ、照明が接続可能。
中空構造を活かした装置構成で、周辺機器との干渉がなく、様々な方向や角度から挿入可能です。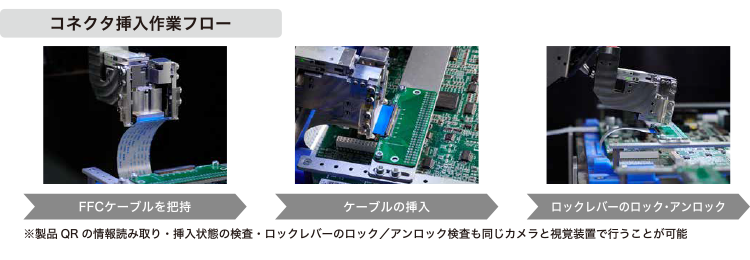 拡大
拡大 -
POINT 3
簡単なセットアップ
視覚センサを用いたリアルタイム補正により、厳密な位置決めなしで、正確な挿入が可能。生産現場での段取り替え時のセットアップ時間を短縮します。
-
POINT 4
トレーサビリティ機能を標準装備
挿入時・挿入完了時の外観検査結果を画像情報として保存。
QRコードリーダ機能を標準搭載し、画像情報と紐付けた検査結果等の管理・記録が可能です





